Polaris: Accurate, Vision-free Fiducials for Mobile Robots with Magnetic Constellation
Abstract
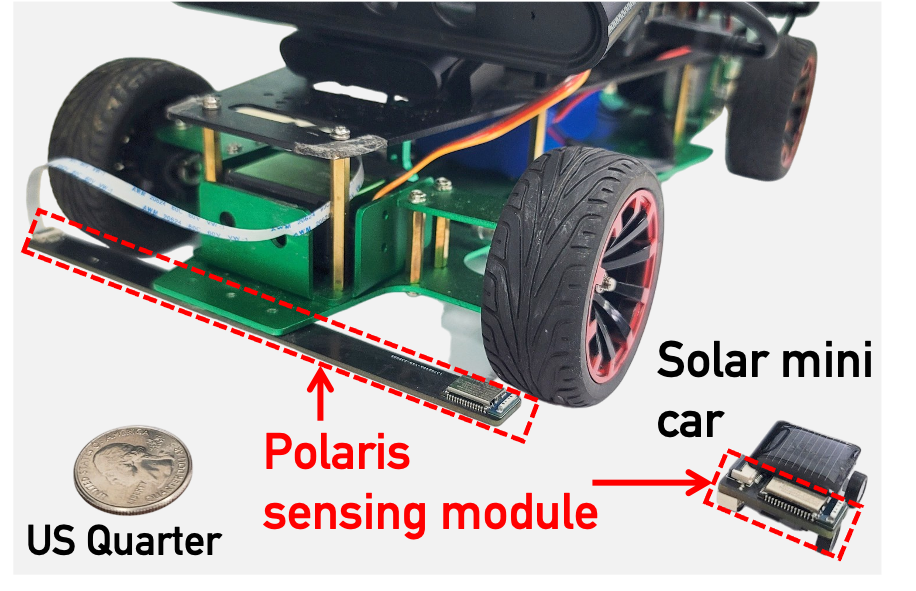
Mobile robots rely on fiducial markers — printed patterns like ArUco or QR codes — for pose estimation and navigation. These markers must be visible to cameras, which makes them vulnerable to occlusion, lighting variation, and dirt. Polaris replaces visual fiducials with magnetic constellations: arrangements of passive magnets embedded in the floor that robots detect with onboard magnetometers.
Polaris is the world's first invisible fiducial system for mobile robots. It operates in complete darkness, through opaque surfaces, and without any active infrastructure — providing accurate pose calibration and reliable navigation in real-world warehouse and factory settings.
Key Contributions
- First magnetic fiducial system for mobile robot localization — fully invisible, no power needed.
- Encodes unique IDs via spatial arrangements of permanent magnets (magnetic constellation).
- Robust to dust, spills, and occlusion that defeat camera-based fiducials.
- Open-source implementation: github.com/wjk5117/Polaris.
BibTeX
@inproceedings{wang2024polaris,
title = {Polaris: Accurate, Vision-free Fiducials for Mobile Robots with Magnetic Constellation},
author = {Wang, Jike and Iravantchi, Yasha and Sample, Alanson and Shin, Kang G. and Wang, Xinbing and Chen, Dongyao},
booktitle = {Proceedings of the 30th Annual International Conference on Mobile Computing and Networking (MobiCom)},
year = {2024},
publisher = {ACM}
}