Abstract
Magnetic tracking using the Levenberg–Marquardt (LM) algorithm offers high accuracy but suffers from sensitivity to initial parameter estimates — a poor initialization can cause the solver to converge to a wrong local minimum, especially during rapid or large-range motion.
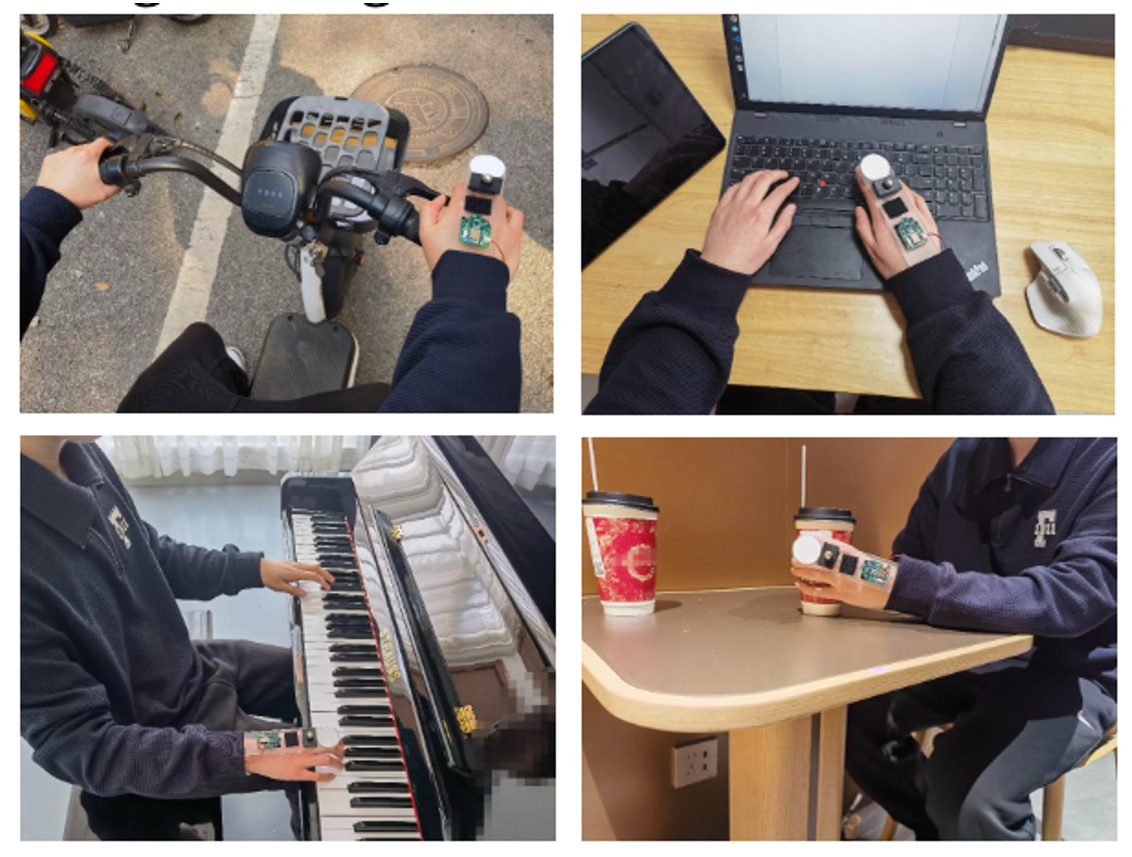
This work introduces a differential magnetic tracking approach combined with deep learning to overcome the initialization sensitivity of LM. By predicting robust initial estimates from a neural network trained on magnetic field patterns, the system dramatically expands the operating range and usability of magnetic tracking for mobile HCI scenarios — enabling extended, uninterrupted interaction without manual resets.
Key Contributions
- Addresses the initialization sensitivity problem of the LM algorithm in magnetic tracking.
- Deep learning model provides robust initial parameter estimates from raw magnetic field data.
- Extends the operating range of magnetic tracking for mobile interaction scenarios.
- Enables uninterrupted, drift-resilient tracking without user intervention.
BibTeX
@article{chen2025magdelta,
title = {Towards Extended Interaction with Differential Magnetic Tracking and Deep Learning},
author = {Chen, Zhenyu and Chen, Peihang and Huang, Jingyuan and Chen, Dongyao},
journal = {International Journal of Human-Computer Interaction (IJHCI)},
year = {2025},
doi = {10.1080/10447318.2025.2565394},
publisher = {Taylor \& Francis}
}